CAN, or Controller Area Network, is a specially designed method of communication for embedded systems in modern automobiles, and allows the interaction between the various computers within today’s vehicles. This communications protocol is one of five used by OBD systems to convey information. CAN is the method through which the internal communication between sensors and processors is done as well. The CAN bus has allowed modern vehicles to become as dependent on computer technology as they are.
CAN operates based on “nodes”. A node consists of the bus, a transceiver, a controller, and the system it controls or relays information for. The bus provides the path for signals for the transceiver to be sent and received. This bus runs throughout the modern automobile because there are so many components requiring communication with one another. This constant connection between all the controllers on a network requires two crucial protocols to locate and determine issues.
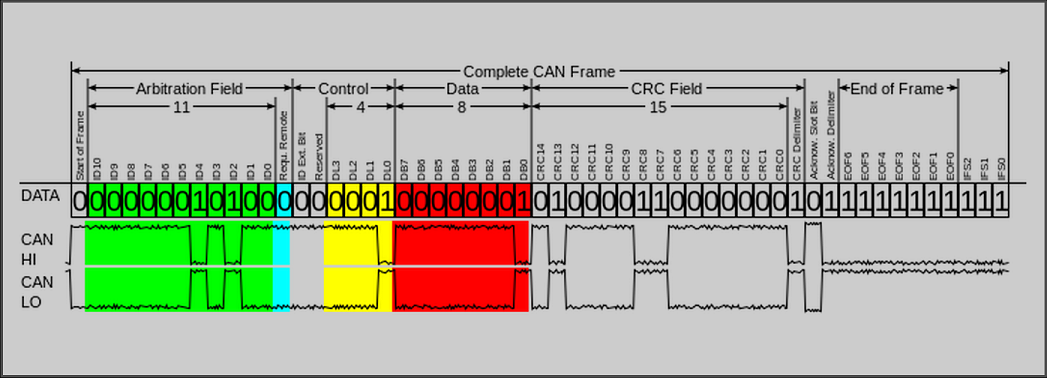
CAN synchronizes the signals, processes them, then transmits the next set of signals. The way these signals are sorted and processed is through a process called arbitration. Arbitration looks at the first part of the signal and depending on whether the bit in the sequence is one or a zero, the transmitting node receiving ceases transmitting if the signal it receives takes precedent over itself. This allows the most important signals to indicate the location and importance of any issues or data throughout the vehicle. Below, one can see how one of these signals is structured, and how important that arbitration code is.